Soft Robotics in Healthcare
Fabric-based Soft Robotic Assistive Glove
The soft robotic glove is a fully fabric-based assistive glove designed for the rehabilitation of hand impaired persons, notably stroke patients. Bidirectional actuators, which allows for flexion and extension of the fingers, allow for a variety of grasps and pinches to assist patients in carrying out functional daily activities.
Related Publications:
1. Design and characterization of low-cost fabric-based flat pneumatic actuators for soft assistive glove application. July 2017IEEE International Conference on Rehabilitation Robotics : [proceedings] 2017:1465-1470. DOI: 10.1109/ICORR.2017.8009454
2. Soft Fabric-Based Pneumatic Sensor for Bending Angles and Contact Force Detection. November 2018IEEE Sensors Journal PP(99):1-1. DOI: 10.1109/JSEN.2018.2882796

Soft Robotic Sock for Ankle Rehabilitation
The soft robotic sock, which mimics tentacle movements of corals, can benefit bedridden or immobile patients by providing multiple axes of ankle mobilization while patients are recovering on their ward beds. Through mobilization of the immobile lower limbs, the novel device can potentially optimize therapy sessions and simultaneously able to enable the patient’s lower leg movements to be monitored to improve therapy outcomes.
Related Publications:
1. F.Z. Low, J.H. Lim, J. Kapur, C.H. Yeow. Effect of a Soft Robotic Sock Device on Lower Extremity Rehabilitation following Stroke: A Preliminary Clinical Study with Focus on Deep Vein Thrombosis Prevention, IEEE Journal of Translational Engineering in Health and Medicine, 2019.
2. F.Z. Low, H.H. Tan, J.H. Lim, C.H. Yeow. "Design, characterisation and evaluation of a soft robotic sock device on healthy subjects for assisted ankle rehabilitation", Journal of Medical Engineering & Technology, 42:1, 26-34, DOI: 10.1080/03091902.2017.1411985.


Internet of Things (IoT) Platform for Soft Robotic Device Integration for Rehabilitative Purposes
Soft Robotic Devices have been in development for rehabilitative purposes such as the glove, sock, wrist, shoulder and hip actuator prototypes, and user intent recognition using biometric sensors such as surface EMG and flex sensors have proven to be quite successful in augmenting these soft robotic assistive device functions. However, these devices are potentially limited in performance due to the lack of in-situ performance data to customise the robot-assisted therapy to each patient, such as the amount of biomechanical displacement (e.g. joint angles) to produce, and quantitative assessment of his/her biometric data (flex, sEMG, EEG, etc).We therefore explore the use of Internet of Things (IoT) technology to unite these discrete control systems together to allow a central platform where we can obtain such in-situ data to provide improved intent recognition as well as potential biomechanical markers for recovery. This IoT platform also aims opens up future opportunities for improved soft robotic performance via data analytics and machine learning inputs.
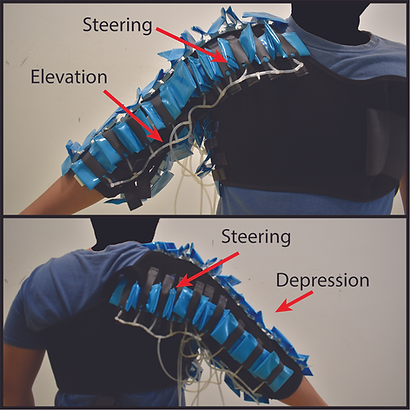
ARMAS Shoulder: A 2DOF Shoulder Exosleeve for Shoulder Rehabilitation
ARMAS Shoulder is a robotic sleeve powered by modular, fabric actuators. The actuator is constructed using pneumatically-activated, separable inflation modules. Its unique construction allows it to provide support to the shoulder in a natural fashion; ARMAS shoulder can provide support to drive the upper arm to any point on its workspace. This degree of mobility can assist patients to perform rehabilitative exercises in a natural manner.
Related Publications:
1. Natividad RF, Hong SW, Miller-Jackson TM, Yeow RCH. The Exosleeve: A Soft Robotic Exoskeleton for Assisting in Activities of Daily Living. In: Carrozza MC, Micera S, Pons JL, editors. Wearable Robotics: Challenges and Trends WeRob 2018 Biosystems & Biorobotics [Internet]. Pisa: Springer Nature Switzerland; 2019. p. 406–9.
Available from: http://link.springer.com/10.1007/978-3-030-01887-0_78